| iPhone Testing System |
Jan 2010 - Dec 2010 |
I collaborated with the iPhone Product Design team to
develop a novel testing system as part of the
Olin Senior Capstone Program in Engineering (SCOPE).
Specifics cannot be revealed under the non-disclosure agreement.
Apple confidential
|
 |
Eli Sheldon, Michael Lintz, Jayesh Gorasia, Edward Byun, Ryan Harris, Daniel Greeley, Ananya Kejriwal |
| Reconfigurable Rescue Robot |
Nov 2010 - Dec 2010 |
As a project in my Systems class, we designed
a self-reconfigurable modular robot for use in rescue and
reconnaissance scenarios. The robot featured a variety of
configurations suited to specific environments or missions.
The system is also extensible, allowing new modules to be
added as robotic technology advances. The final design was
presented to DARPA
program managers and leaders in the field of robotics.

centipede configuration
|

rolling configuration
|

"spider" configuration
|

snake configuration
|
|
David Gardner, Helen Oleynikova, Lorraine Weis, Arash Ushani, Velin Dimitrov |
| Educational Toy Design |
Dec 2010 |
I worked briefly with a professor to design and render a set
of interactive engineering toys that interface with mobile
computing devices.

scientific toys and tablet being used outside
|
|
Dr. Mark Chang (faculty) |
| da Vinci Toys Startup |
Oct 2010 - Nov 2010 |
I co-founded a company creating educational engineering kits
as part of my Foundations of Business and Entrepreneurship
class. I designed a product line, sourced materials,
created marketing materials, sold products, and hosted
promotional events. The company earned over $3500 in revenue
during its two-week selling period.

company logo
|

aerospace engineering kit
|
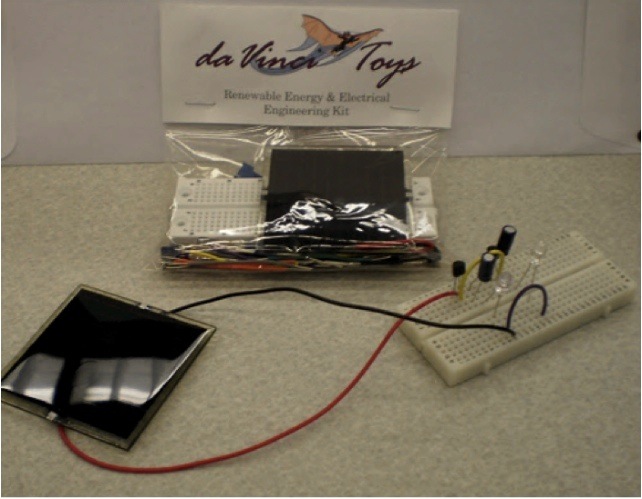
electrical engineering & renewable energy kit
|
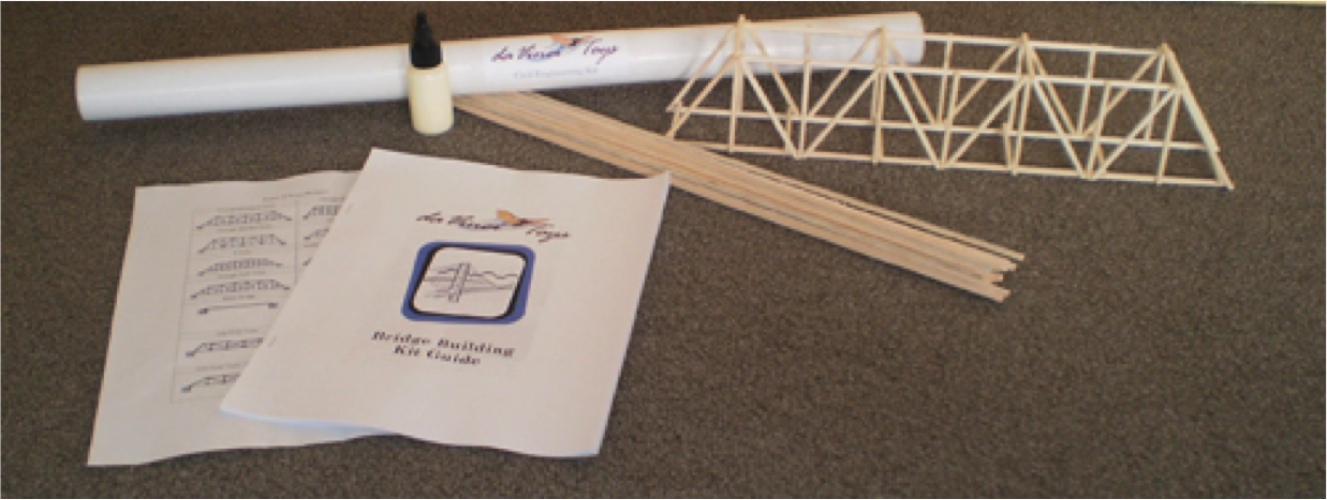
civil engineering kit
|
|
Claire McLeod, Thomas Pandolfo, Jackie Rose |
| Investigation of College Tuition Prices |
Oct 2010 |
As a small project for my Probability and Statistics class, I
investigated increasing college tuition prices. While more
an example of different computational methods used for
statistics than an in-depth study, it was interesting to
observe how education has gotten more expensive over the
years.
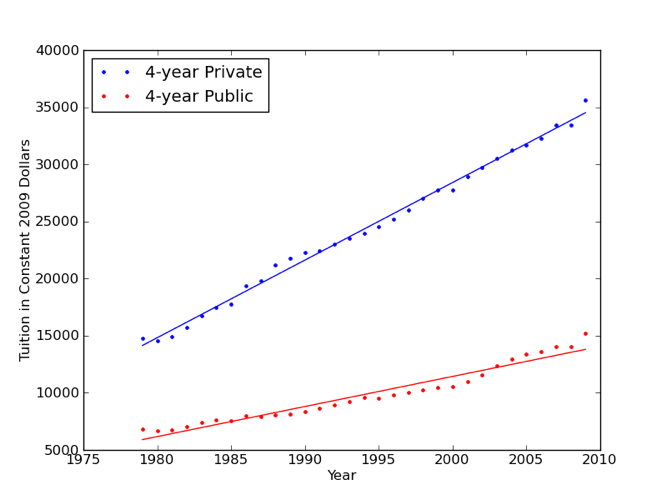
long term trends
|
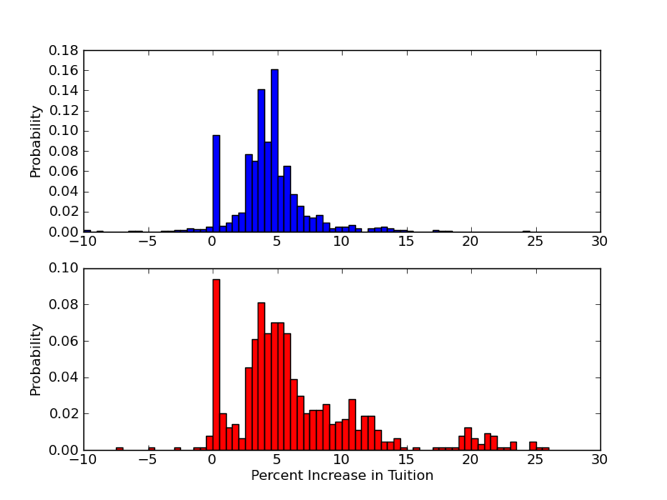
PMF of 2009 tuition change (private colleges in blue, public in red)
|
| Microsoft Dynamics Feature Design |
Jun 2010 - Aug 2010 |
During the summer of 2010 I worked as a Program Manager at
Microsoft. While
there, I designed an interactive portal experience for
partner organizations building ERP solutions using Microsoft
Dynamics Online services. I researched users to develop
personas, collaborated with my team to refine designs, and
wrote specifications to guide implementation.

Microsoft confidential
|
|
Microsoft Dynamics Online Services team |
| Intelligent Ground Vehicle Competition |
Apr 2010 - Jun 2010 |
Improving on our 2009 autonomous vehicle, we made numerous
hardware and software changes to increase the robot's ability
to navigate and avoid obstacles. In particular, the use of
a field-programmable gate array (FPGA) enabled significant
improvements in the reaction time. We place third out of
around fifty teams in the Design Competition at the 2010
International Ground Vehicle Competition (IGVC) in Detroit.

Athena, the 2010 Olin IGVC entry
|
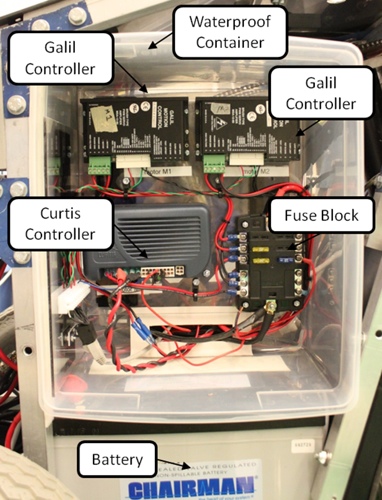
updated electronics enclosure
|
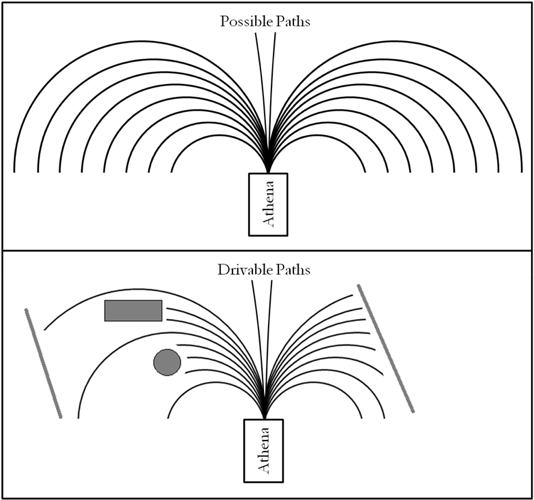
path planning
|

image processing example
|
|
Nicholas Hobbs, Daniel Grieneisen, Jacob Izraelivitz, Gray Thomas, Jessica Noglows, Eric Kolker, Lucas Hill |
 |
2nd in Design Competition at International Ground Vehicle Competition in Detroit, MI ($1000) |
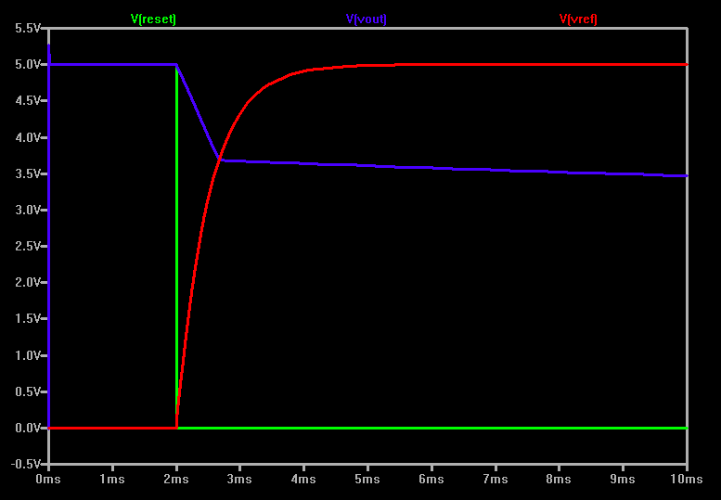
| Rail-to-Rail Differential Amplifier |
May 2010 |
As a mini project at the end of my Microelectronics Circuits
class, I designed and simulated a rail-to-rail CMOS differential
amplifier.
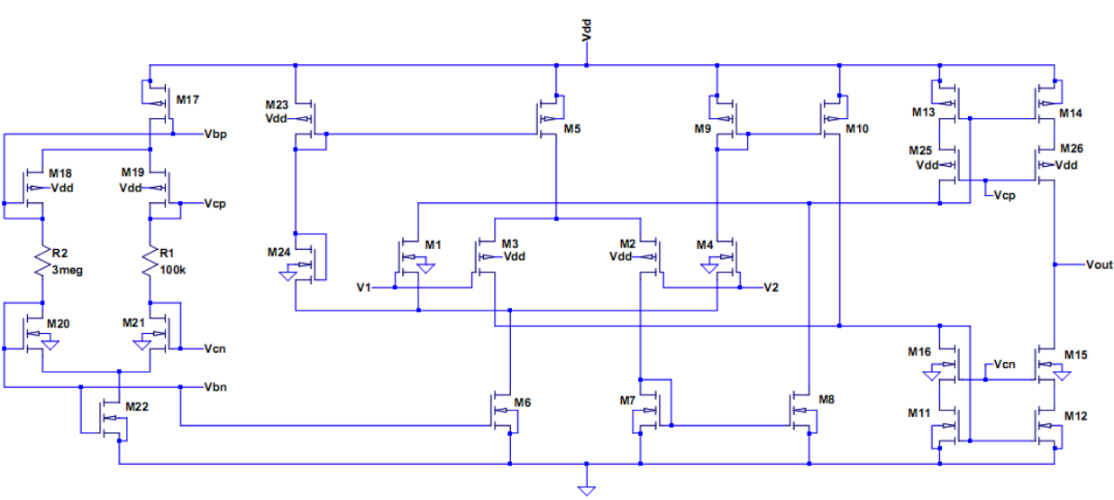
circuit schematic
|
| Miniature Juicer |
Apr 2010 |
As an exercise in precision machining and simple
transmission design for a Mechanical Prototyping course,
several classmates and I built a miniature grape juicer.
While not particularly useful, it was an instructive project
and the juicer remains a small work of engineering art.
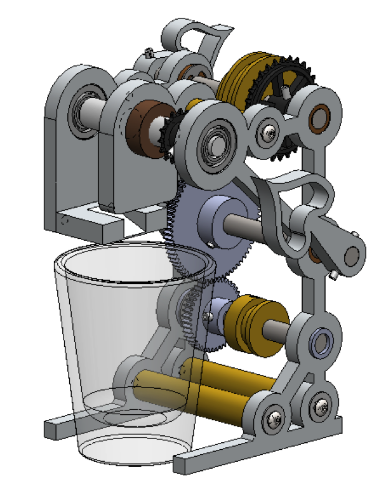
engineering model of juicer
|
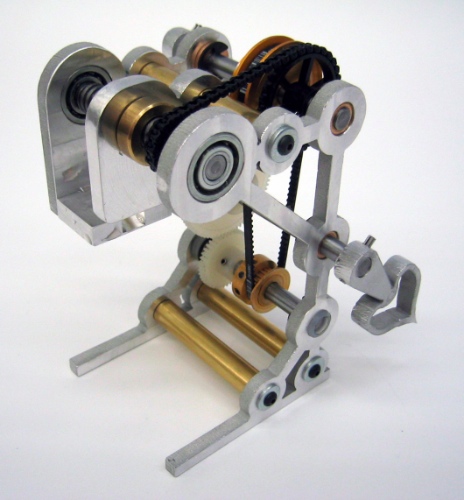
final, assembled juicer
|
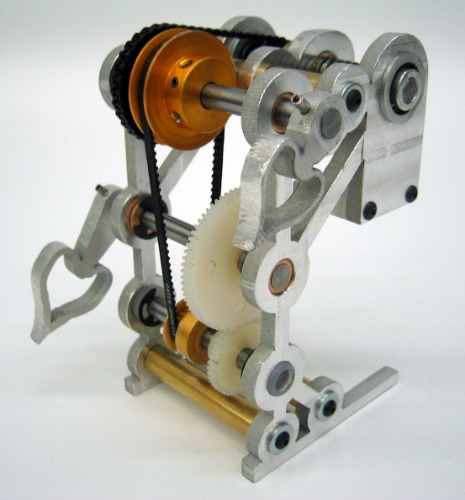
back side of juicer
|
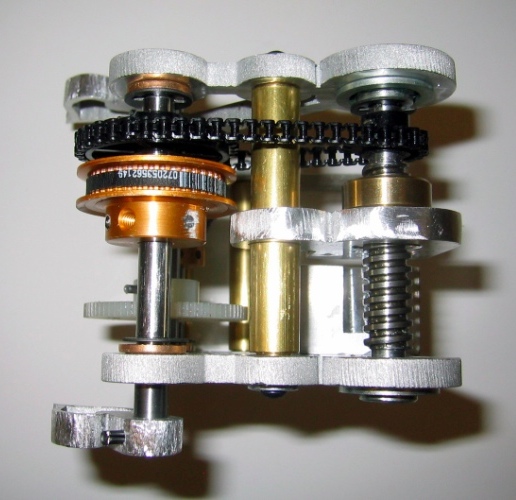
top view
|
|
Leah Mendelson, Abe Feldman, and others |
| Biomimetic Swimmers |
Feb 2010 - Apr 2010 |
In my Mechanical Prototyping course, I worked on
several teams throughout the semester to learn rapid
prototyping techniques for manufacturing. Over four week
sprints we designed and assembled biomemetic swimmer
models. My teams built a motorized flying fish out of sheet
metal and a 3D-printed, motorized dolphin.
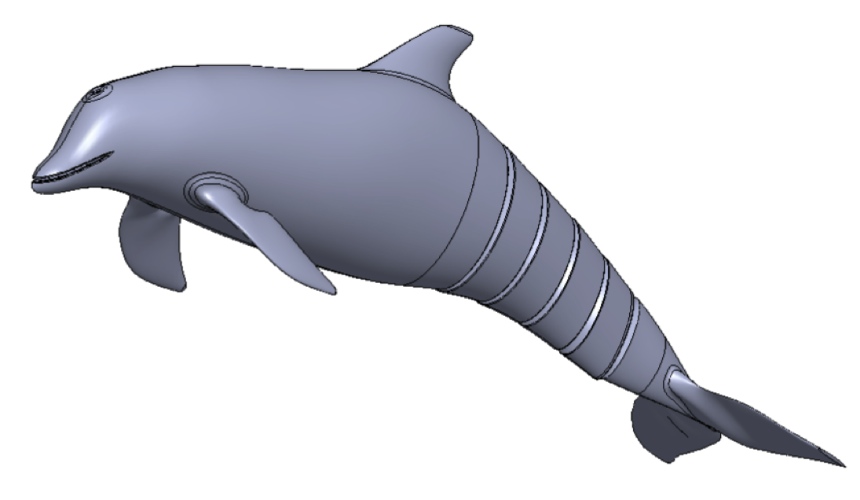
engineering model of motorized dolphin
|
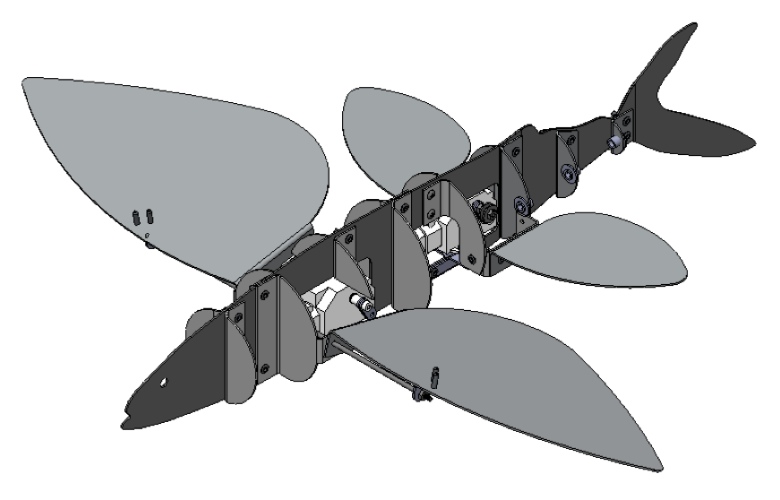
SolidWorks model of motorized flying fish
|

final, assembled dolphin
|
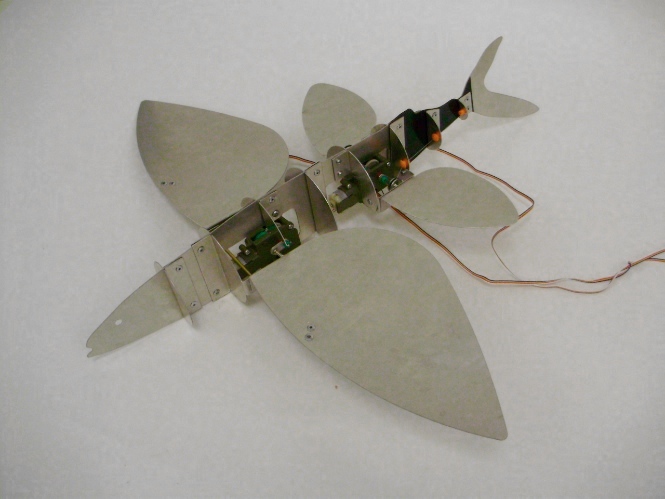
final, assembled flying fish
|
|
Neil Paulson and others |